English
English العربیه
العربیهبا پیشنهادات و خدمات ما آشنا شوید:
ایدههای شما شکل میگیرد.
اگر به دنبال واقعیت بخشیدن به ایدههای خود در ساخت قطعات و نمونه سازی سریع، اتوماسیون صنعتی و دستگاههای اتوماتیک، و رباتهای نرم هستید؛ کافی است ایدهها و برنامههایتان را با ما مطرح کنید. ما نیازها و درخواستهای شما را ارزیابی و بررسی میکنیم، ایدههایتان را بسط میدهیم، و یا ایدههای برتر و جایگزین ارائه میکنیم. در ادامه با تکیه بر علم، دانش، و مهارت یک گروه متخصص، بهترین ایده مطابق نظر شما انتخاب میشود.
شرکت سافت-میکر مفختر است که با ارائه خدمات مهندسی باکیفیت و سریع، در خدمت شما کارآفرینان، مدیران صنایع، کارخانه داران، مهندسین، و بازرگانان باشد.
ارائه ما در قالب سه دسته زیر طبقه بندی می شوند:
1- خدمات مهندسی: بومی سازی (Localization)، مهندسی معکوس (Reverse Engineering)، و طراحی مهندسی (Engineering Design) قطعات/دستگاهها/مکانیزم ها/محصول؛ ایجاد مستندات مهندسی و فنی برای دستگاههای وارداتی؛ تبدیل نقشه های مهندسی دوبعدی (نقشه کاغذی/نقشه اتوکد) به فایل ها و مدل های مهندسی؛ تهیه و ایجاد نقشه های مهندسی دوبعدی از مدل های سه بعدی در سطح استانداردهای مهندسی بین المللی.
2- خدمات ویژه: طراحی و ساخت پکیجی از رباتهای نرم و سبک (Soft Robotic Products) شامل: بازوهای انعطافپذیر و نرم رباتیکی (Flexible Robotic Manipulators)، گریپرهای رباتیکی نرم (Soft Grippers)، و اکچوئیتورهای خطی/خمشی/پیچشی/صفحه ایِ پنوماتیکی (Soft Pneumatic Actuators) برای کاربردهای بسته بندی و چیدمان، با هزینه بسیار معقول و مقرون بصرفه با توجه به شرایط اقتصادی کشور.
3- خدمات جانبی: اسکن سه بعدی (3D Scanning) با دقت 0.01 میلیمتر/10میکرون؛ مدلسازی مهندسی سه بعدی (3D Engineering Modeling)؛ و نمونه سازی سریع (Rapid Prototyping) با بهره گیری از روش ساخت افزودنی (Additive Manufacturing) با روش های قالب گیری مدرن (Modern Molding) و چاپ/پرینت سه بعدی (3D Printing)، با بکارگیری مواد پلاستیکی خشک، لاستیکی نرم با درجه سفتی های مختلف (Shore Hardness)، مواد پلاستیکی با تحمل حرارت بالا، رزین، و فلز.
ارائه خدمات فوق الذکر با اجرای نکات مورد نظر کارفرما و با ارائه حق نشرکامل برای کارفرما. بعبارت دیگر، در قالب یک قرارداد، تمامی حقوق کارفرما در قبال کپی قطعه/دستگاه/مکانیزم برسمیت شناخته شده و سافت-میکر بعنوان پیمانکار رسمی کارفرما شناخته خواهد شد که هیچ گونه حق پخش و نشری را نخواهد داشت.
رباتهای نرم و سبک
استفاده از رباتهای سخت، صلب، سنگین وزن و بزرگ همیشه و در همه موارد امکانپذیر نیست. در فضاهایی با عدم دسترسی ساده و راحت، محدودیت جا، فضا، مکان ها و محیط های خطرناک، الزام در بکارگیری رباتهایی جهت انجام امور ظریف و دقیق و مواردی از این قبیل، جایی که ربات های سخت و بزرگ کارایی ندارند احساس می شود؛ که این نیاز با ارائه ربات های نرم و سبک در حال رفع شدن است. یکی دیگر از مزایای رباتهای نرم برخلاف رباتهای سخت این است که آنها دارای قابلیت تعامل با موجودات زنده هستند. از طرفی دیگر، هزینه کمتر طراحی، ساخت و راه اندازی رباتهای نرم نسبت به رباتهای سخت (صلب) باعث می شود که تقاضاها در رابطه با بکارگیری این نوع ربات ها در آینده در دنیا فزونی یافته و سهولت دسترسی به آنها نیز افزایش یابد. ضمنا، بواسطه داشتن بدنه ای سبک، ربات های نرم می توانند به راحتی حمل شوند که این مزیتِ بزرگ، قابلیت و سهولت استفاده از این نوع ربات ها را بسیار افزایش می دهد.
تمامی موارد ذکر شده از مزایای ربات های نرم و حتی بسیاری دیگر از کاربردهای ذکر نشده، باعث شد که تحقیقات در زمینه رباتهای نرم در مؤسسات برتر تحقیقاتی و دانشگاهی دنیا به یک امر ضروری و غیرقابل اجتناب تبدیل شود.
طراحی و ساخت رباتهای نرم یکی از زمینههای نوظهور در زمینه رباتیک است و همچنان تحقیقات در این زمینه ادامه دارد. برترین دانشکدههای مهندسی در شاخه¬های مکانیک، مواد، برق و کامپیوتر از دانشگاههای معتبر دنیا، از حدود سال 2012 نتایج تحقیقات و ساخت این نوع رباتها را در قالب انتشار مقالات علمی، بطور رسمی آغاز کردند. به این ترتیب، روند روزافزونی در زمینه واگذاشتن رباتهای بزرگ، صلب و غولپیکر در کارخانهها و در عوض استفاده از رباتهای نرم و انعطافپذیر در موارد متعدد مورد نیاز در مؤسسات، مراکز، صنایع و زندگی روزمره مردم شروع شده است، که قطعاً این روند آینده درخشانی پیش رو خواهد داشت.
شرکت ما از سال 2014 فعالیت در این زمینه را آغاز کرده است و تاکنون موفق به ساخت سه ربات نرم و ارائه مقالات متعدد در منابع علمی معتبر در سطح جهانی شده است. تمامی مراحل از ایده پردازی تا خلق و ساخت رباتها، حاصل تلاش و مطالعات شبانهروزی تیم ما بوده است؛ که با تلاش ها و ممارست¬های انجام شده در گروه ما و برخی از محافل عملی کشور، ایران در زمره بیست کشور پیشرو در حوزه تحقیقاتی رباتهای نرم قرار گرفته است. با این وجود، بجز شرکت ما، هنوز شرکت رسمی در زمینه ربات های نرم و سبک در کشور و حتی خاورمیانه تاسیس نشده است و ما جزو پیشگامان این زمینه هستیم.
با توجه به قابلیتهای منحصربهفرد رباتهای نرم، کاربرد این نوع رباتها محدودیت ندارد. مؤسسات تحقیقاتی، مراکز توانبخشی، سراهای سالمندان، صنایع کوچک و بزرگ و حتی در موارد استفاده شخصی، میتوانند بر اساس نیازهایشان با ما تماس بگیرند و ما بر اساس نوع نیازهای آنها، در صورت عملی بودن استفاده از رباتهای نرم، ایده پردازی میکنیم؛ بهترین ایده را انتخاب، مفهوم پردازی، طراحی و بهینهسازی کرده، و در نهایت با یک هزینه پایین، ربات نرم موردنظر را در جهت رفع آن نیاز، میسازیم.
لازم بذکر است که هدف اصلی شرکت ما کاربردی سازی و تجاریسازی این نوع رباتها است.
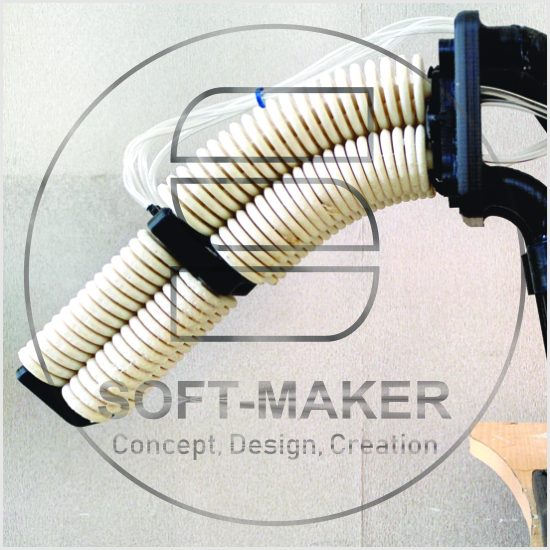
بازوهای رباتیک نرم بندبند انعطافپذیر
بازوهای رباتیک صنعتی متشکل از یک سری قطعات و لینکهایی هستند که در یک فضای تعیینشده، یک کار مشخص و محدود را انجام میدهند. ربات های جوشکار و ربات های رنگ کار (نقاش) در خودروسازی ها شاید بارزترینِ این نوع بازوها باشند.
در عوض، بازوهای نرم انعطافپذیر بندبند، قابلیت انجام کارهای متنوع و ترکیبی را دارا هستند. در مکانهایی که به دلیل محدودیت فضا، استفاده از رباتهای صلب و صنعتی امکانپذیر نیست، میتوان به تنهایی و یا با تعبیه یک عملگر نهایی روی این نوع از بازوها، از آنها در بسیاری از شرایط و کارها بهره گرفت، چرا که قابلیت تغییر شکل دارند. این نوع رباتها، میتوانند از فضاهای تنگ و پیچدرپیچ عبور کنند و در محیطهای نامنظم و یا اصطلاحاً محیطهای بدون ساختار (Unstructured Environments) بهراحتی موانع را پشت سر بگذارند.
علاوه براین موارد، این نوع رباتها میتوانند استفاده خاص داشته باشند. به عنوان مثال، در صورت لزوم ارسال یک ربات به اعماق دریاها یا اقیانوسها، فاضلاب، لولهها، در زیر ساختمانها و سایر مکانها و فضاهایی با عدم سهولت در دسترسی توسط یک ربات سخت و یا انسان؛ ما میتوانیم رباتهایی طراحی کنیم که قابلیت ورود و حرکت در چنین فضاهایی را داشته باشند و بتوانند در این مکانها مأموریت مورد نظر به عنوان مثال نمونهبرداری و عکسبرداری را انجام دهند.
بنابراین، با توجه به توضیحات داده شده، زمینه کار ما در زمینه ربات¬های نرم محدودیت ندارد. در فضاهایی که نیاز به وجود رباتهای نرم باشد، با توجه به نیاز مطرح شده، ما میتوانیم تمام مراحل از ارائه ایدهها تا ساخت ربات مورد نظر شما را انجام دهیم.
عملگرهای نهایی نرم
عملگرهای نهایی (End-Effector) یا همان گریپرها (Grippers)، معمولاً در انتهای ربات های بازو شکل، ربات های موازی و بسیاری از ربات های دیگر نصب میشوند. همانند پنجه و انگشتان دست، عملگرهای نهایی قابلیت برداشتن و گذاشتن (Pick & Place)، و حمل و جابهجایی اشیاء را به ربات ها می دهند. گریپرها دو نوع دارند. نوع اول، گریپرهایی هستند که با استفاده از فلزات، بدنه آنها ساخته شده و توسط انواع موتورها و کابلها راه اندازی می شوند. این نوع گریپرها دارای بدنه سنگین و صلب هستند و اکثراً در صنایع سنگین مورد استفاده قرار می گیرند. نقطه ضعف بزرگ این نوع گریپرها در مواجه ي آنها با اشیاء نرم است که به سادگی باعث آسیب دیدن اشیاء، قطعات ظریف و یا نرم می شوند. نوع دوم، گریپرهای نرم و سبک هستند. از مزایای بزرگ این نوع از گریپرها نسبت به گریپرهای صلب و سنگینِ سنتی این است که به راحتی با محیط زنده و نرم اطراف خود سازگار می شوند. با بهره گیری از گریپرهای نرم، شما قادر خواهید بود که اشیاء نرمی چون یک کیک خامه ای، یک شاخه گل، انواع میوه ها و حتی یک سکه را از روی یک میز برداشته و به مکان مورد نظر خود انتقال دهید.
در شرکت سافت-میکر، با تکیه بر دانش، تخصص، و تجربه؛ ما توانسته ایم سه نوع مختلف از گریپرهای نرم را طراحی کرده و بسازیم. بعلاوه، تیم ما میتواند بر اساس نیاز شما، این نوع گریپرها را طراحی و شخصی سازی کرده، بسازد، و در نهایت به شما تحویل دهد.
عملگرهای پنوماتیکی خطی،خمشی، پیچشی، و صفحه ای نرم
اگر به دلیل محدودیت هایی چون محدودیت فضای کاری و محدودیت وزن، امکان استفاده از عملگر یا اکچوئیتورهای بزرگ وجود نداشته باشد؛ عملگرهای پنوماتیکی نرم میتوانند جایگزین مناسبی باشند. ما در شرکت سافت-میکر با طراحی و ساخت انواع منحصربفرد عملگرهای پنوماتیکی نرم و انعطاف پذیر، توانسته ایم قابلیت تغییر طول ثانویه ای تا 3.5 برابر طول اولیه عملگر را بدست آوریم. به عنوان مثال، عملگر خطی نرم ما میتواند طول خودش را از ده سانتی متر به سیوپنج سانتیمتر تغییر دهد و در هر اندازهای در این بازه با یک کنترل دقیق بایستد. همانطور که ذکر شد با اجرای الگوریتم های کنترلی ساده تا پیچیده، ما قادریم عملگرهای انعطاف پذیر را با دقت بالایی در هر نقطه دلخواهی از بازه کاری اش نگه داریم؛ این درحالی است که عملگرهای پنیوماتیک صنعتی امکان تغییر طول یا استفاده در مکانهای با فضای بسیار محدود را ندارند.
مواد مورد استفاده در رباتهای نرم
در ساخت رباتهای نرم عمدتاً از مواد نرم، انعطاف پذیر، و کشسان استفاده میشود. انواع سیلیکونها و لاتکس ها ز موادی هستند که به وفور در ساخت رباتهای نرم استفاده میشوند. در استفاده از سیلیکونها از روشهای ریختهگری خاص، و جهت بهره گیری از مواد انعطاف پذیر، از ماشینهای چاپ سه بعدی استفاده میشود. لاتکس ها هم از مواد بسیار کشسان و انعطافپذیری هستند که با قالبگیریهای خاص، از این نوع مواد نیز در بدنه رباتهای نرم استفاده می شود. یکی از موارد مورد توجه در انتخاب نوع مواد، عدم آسیب زدن مواد انتخابی به جانداران دیگر است. همچنین رویکرد دیگر در انتخاب نوع مواد، استفاده از مواد زیست تخریب پذیر است که رباتها یا بخشی از آنها قابلیت تجزیه در محیط زیست را داشته باشند. در شرکت سافت-میکر، ما موفق به استفاده از دانه های گیاهان در مکانیزم انباشت مواد در این نوع رباتها شده ایم. مهمترین مزیت مکانیزم یاد شده، در افزایش قدرت ربات های نرم می باشد که تحمل یا قابلیت حمل بارهای خارجی اعمالی در بدنه ربات نرم را افزایش می دهد.
کنترل و راهاندازی رباتهای نرم
کنترل رباتهای صنعتی معمولا بصورت برنامهنویسی و نرم افزاری انجام می پذیرد. کافی است برنامه نویس پس از محاسبات لازم، با پیاده سازی روش های سنتی و مشخصِ کنترلِ ربات، به موتورهای بکار رفته در آن دستورات مقتضی را بدهد. پس از دریافت دستورات در قالب محاسبات انجام شده، ربات قادر خواهد بود وظایف محوله را در محیط مشخص انجام دهد.
ولی در طراحی رباتهای نرم، بواسطه پیچیدگی و ماهیت سبک و نرم آنها، استفاده مستقیم از موتورها و یا سیستم های حجیم و سنگینِ صنعتی و نیمه صنعتی، تعریف علمی و کاربردی ندارد. لذا، طراحی سیستم های کنترلی روی ربات های نرم، مستقیما برروی بدنه آنها اعمال می شود. بدنه ربات های نرم به گونهای طراحی میشود که بتوان از طریق کنترل حرکات بدنه، کل ربات را بطور دقیق کنترل کرد. این بدان معنی است که فُرم هندسی بدنه ربات های نرم در بحث کنترلی آنها حرف اول و آخر را می زند. همچنین سیستم راهاندازی و تحریک ربات های نرم عموما از با بهره گیری از سیستمهای نیوماتیکی (پنیوماتیکی) میسر است، که با استفاده از هوای فشرده یا خلأ (وکیوم)، و یا ترکیبی از این دو، این نوع رباتها کنترل و راهاندازی میشوند. کنترل بدنه رباتهای نرم بواسطه انعطاف پذیر بودن شان، یکی از زمینههای چالشبرانگیز در زمینه ساخت این نوع رباتها است. تیم سافت-میکر نیز با بهره گیری از بهترین و متخصص ترین مهندسان کنترل، در این زمینه به دنبال پیادهسازی بهترین راهکارهای کنترلی است.
لازم بذکر است که معمولاً رباتهای نرم فقط برای برآورده کردن یک نیاز طراحی نمیشوند، بلکه این نوع رباتها عمدتا برای کاربردهای چند منظوره طراحی و ساخته می شوند.
خدمات مهندسی
- بومی سازی قطعات پلاستیکی و لاستیکی (صلب، نرم، انعطاف پذیر)؛ مکانیزم ها/مجموعه ها/دستگاههای صنعتی، نیمه صنعتی، و پزشکی (مقیاس های کوچک و متوسط)
- مهندسی معکوس قطعات، مجموعه ها، و مکانیزم ها
- طراحی مهندسی محصول (دستگاه/مکانیزم/قطعه)
- تبدیل نقشه های دو بعدی به یک مدل سه بعدی مهندسی

خدمات ویژه
- طراحی و ساخت پکیجی از ربات های نرم و سبک (Soft Robotic Products)
- بازوهای انعطافپذیر و نرم رباتیکی (Flexible Robotic Manipulators)
- گریپرهای رباتیکی نرم (Soft Grippers)
- اکچوئیتورهای خطی/خمشی/پیچشی/صفحه ایِ پنوماتیکی (Soft Pneumatic Actuators)
خدمات جانبی
- اسکن سه بعدی دقیق قطعات (با دقت 10 میکرون)
- مدلسازی سه بعدی مهندسی
- پرینت سه بعدی تخصصی مواد لاستیکی
- پرینت سه بعدی تخصصی مواد پلاستیکی
- پرینت سه بعدی تخصصی مواد فلزی
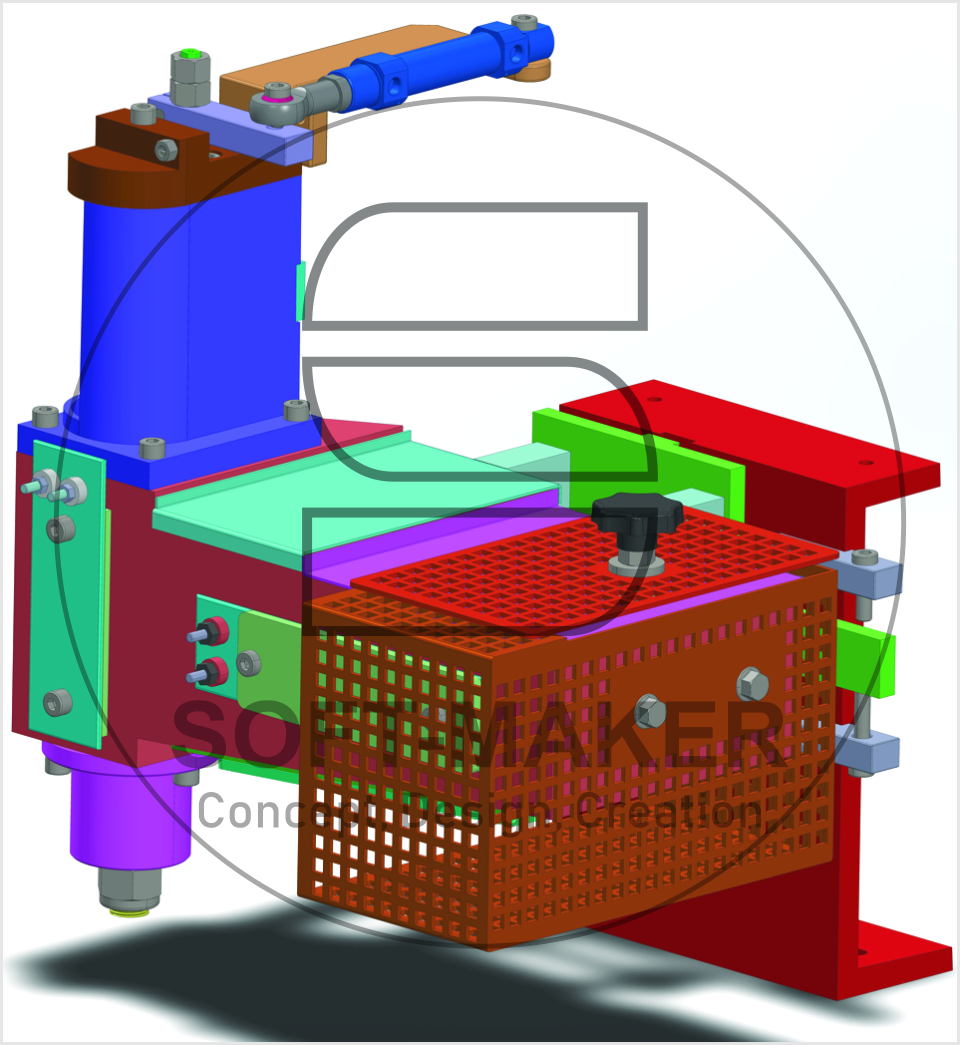
طراحی مهندسی
رباتیک نرم و سبک